- 最終更新日
- 記事公開日
【電動式】回転ロッドスタンドを自作してみた
{kind=link}
「ロッドスタンド、場所取り過ぎ!」
「タックル同士がガチャガチャ絡まってイライラする!」
「リールだけを置くスペースも欲しい!」
ということで、今回はこんな僕の要望を全て詰め込んだロッドスタンドを作ってみました↓
{kind=link}
ボタンを「ポチッ」と押すと、クルクル周る電動式の回転ロッドスタンドです。
コンパクトなので、今までのロッドスタンドよりもかなり省スペースになり、リールホルダーや天板上など、収納力も大きくアップしました。
主な使用パーツ
{kind=link}
総費用は7,000円くらいです。
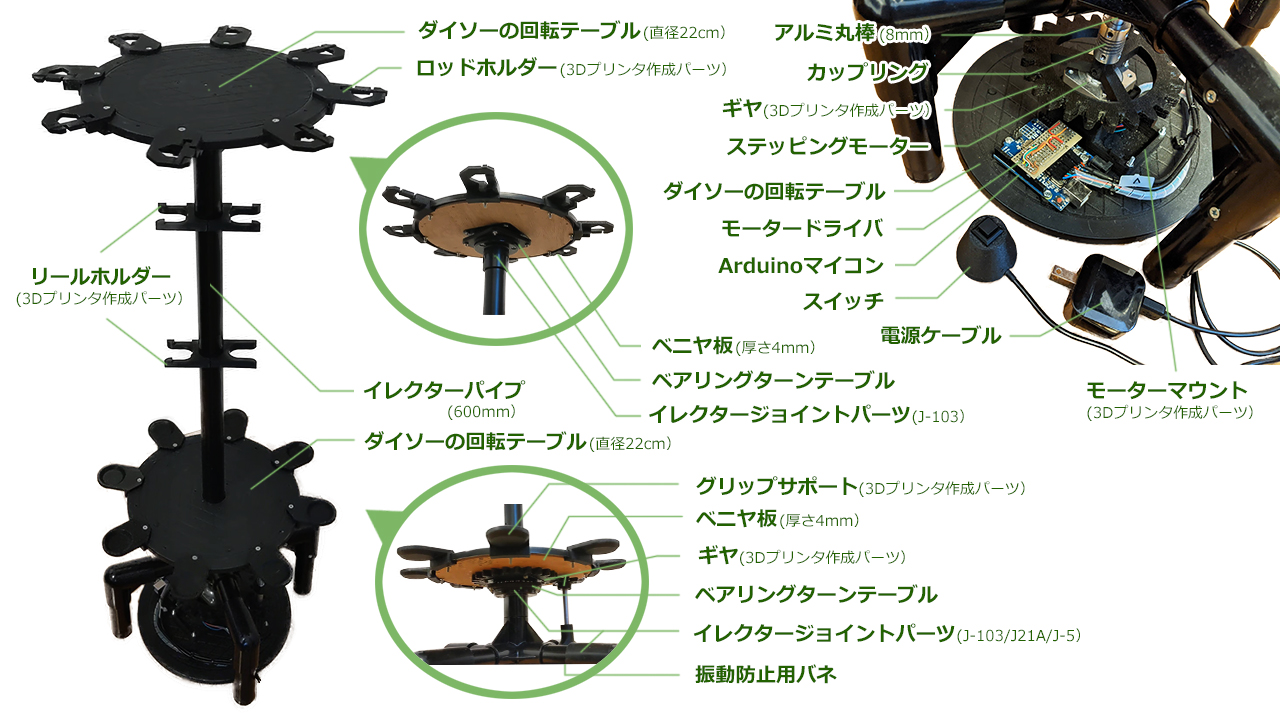
主な使用パーツについて解説します↓
ダイソーの回転テーブル
{kind=link}
ロッドを支える台座のところは、ダイソーの回転テーブルを流用しました。
「木製のロッドスタンドにはないデザイン」「22cmというコンパクトなサイズ」という点が、まさに求めていたもの。
分解すると上下二枚に分かれるので、それを使ってます(中身のベアリングボールは廃棄)
{kind=link}
ただし、厚みがなくロッドの重みに耐えられなかったので、ベニヤ板で補強を行いました。
{kind=link}
ベニヤ板は、ホームセンターにて180円で購入。
厚さは4mmです。
円切りカッターを使って、円状にカットしています↓
ベアリングターンテーブル
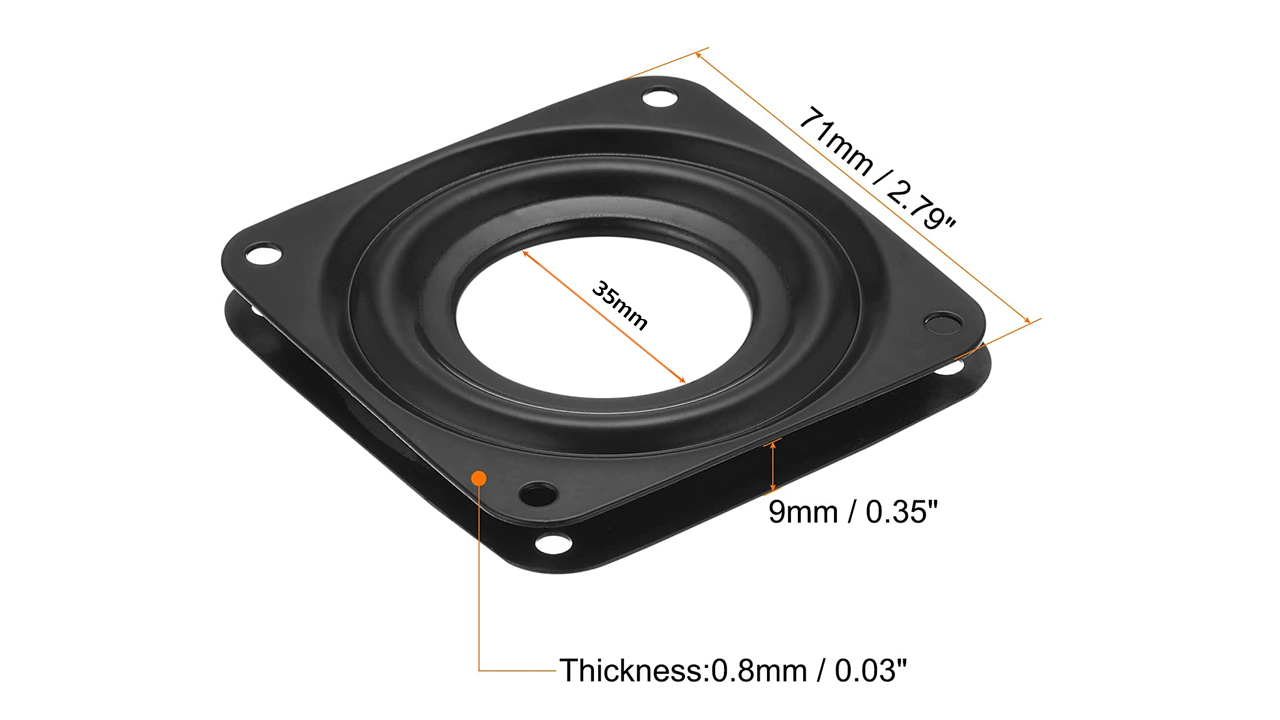{kind=link}
ベアリングターンテーブル(uxcell)71mm - Amazon
ベアリングターンテーブルは、
・ステッピングモーターに掛かる重さの負荷を逃がす
・回転力を妨げる摩擦の負荷を減らす
という役割を担っています。
{kind=link}
今回、使用しているステッピングモーター(ST-42BYH1004)は、それほど馬力のあるモーターではありません。
ロッドとリールを合わせて1タックルで500gの重量があるとして、8本で4kg。
これにパイプや天板の重量も加えると、結構な負荷となり、モーターが回らなくなってしまいます。
できるだけ回転を妨げる力を少なくするために、ベアリングの入ったターンテーブルを使用しています。
ステッピングモーター
{kind=link}
バイポーラ・ステッピングモーター ST-42BYH1004 - 秋月電子
回転の原動となるモーターには「ステッピングモーター」を使用しました。
ステッピングモーターの特徴は、低速でのトルクが強く、回転角度を細かく・精度に調整できること。
使用したモデルは「ST-42BYH1004」です。
5Vで動かせるので、Arduinoマイコン等と相性が良く、扱いやすいモーターです。
ただし、それほど馬力が強いわけではないので、メカの部分で負荷が掛かり過ぎないような工夫が必要になります。
{kind=link}
カップリング
{kind=link}
5mm-8mmカップリング(SeonFook)5個セット - Amazon
径の違うシャフト同士を繋ぐパーツです。
ステッピングモーターのシャフト(5mm)と上台座に繋がるアルミ丸棒(8mm)の接続に使用しています。
バネ状になっており、芯ずれ・振動を吸収してくれます。
このカップリングがないと、軸のズレにより、回転軸のブレ・摩擦力の増加・異音など、さまざまなトラブルが発生してしまいます。
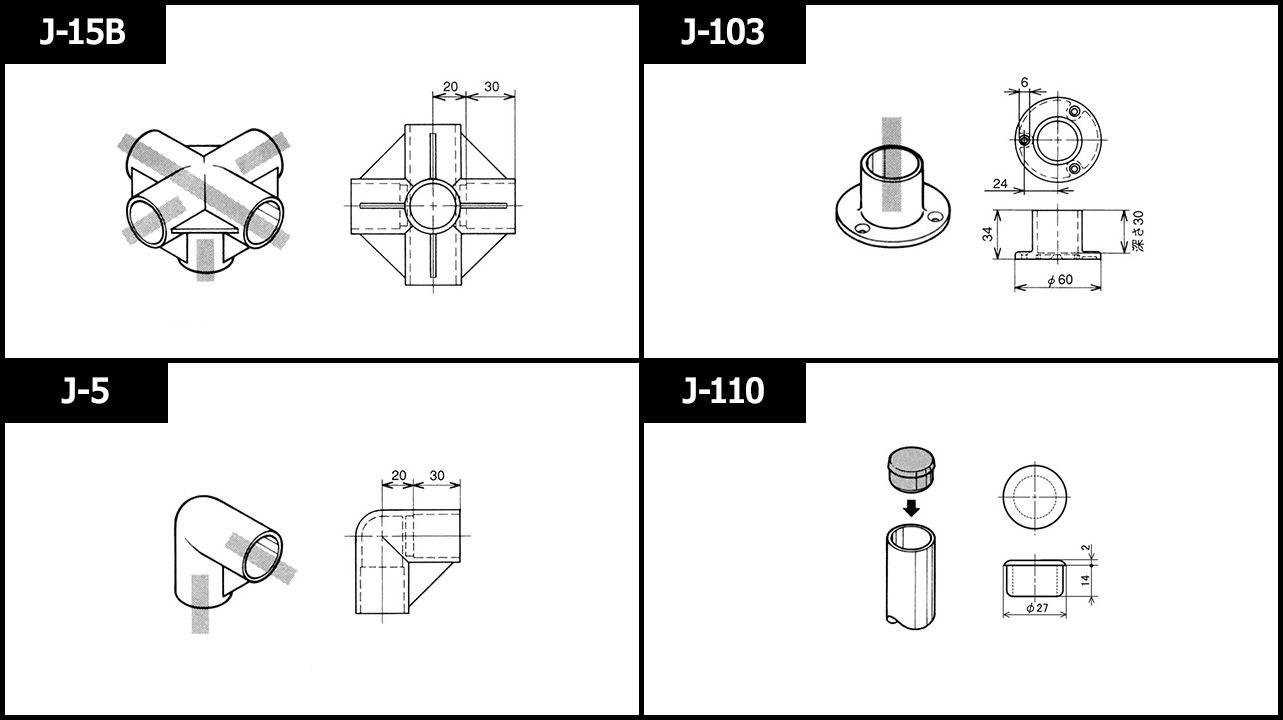
イレクター
{kind=link}
基本の骨組みはイレクターパイプを使用しました。
強度もあり、バリエーションも豊富なので、3Dプリンタで作るよりも低コストで済みます。
- イレクターパイプ:600mm(H-600)× 1本
- イレクターパイプ:120mm × 4本
- 5方向ジョイント(J-15B)× 1個
- 壁面取り付け用ジョイント(J-103)× 2個
- コーナージョイント(J-5)× 4個
- インナーキャップ(J-110)× 4個
Arduinoマイコン&モータードライバー
{kind=link}
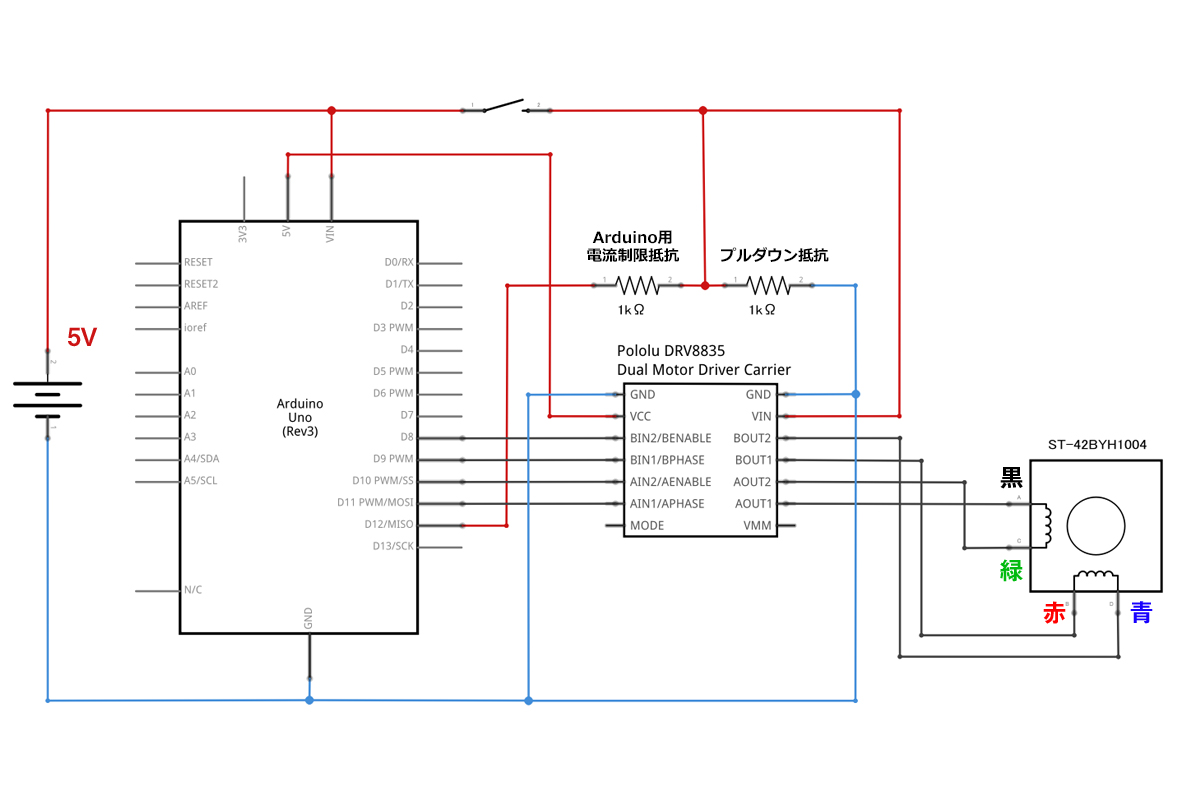
回転制御には「Arduino Uno R3」というマイコンを使用しています。
マイコンは小さいパソコンです。
スイッチが押されたときに「動かして」という命令をマイコンからモータードライバ(DRV8835)へ送っています。
命令を受け取ったモータードライバは、モーターをマイコンの指示通りに動かします。
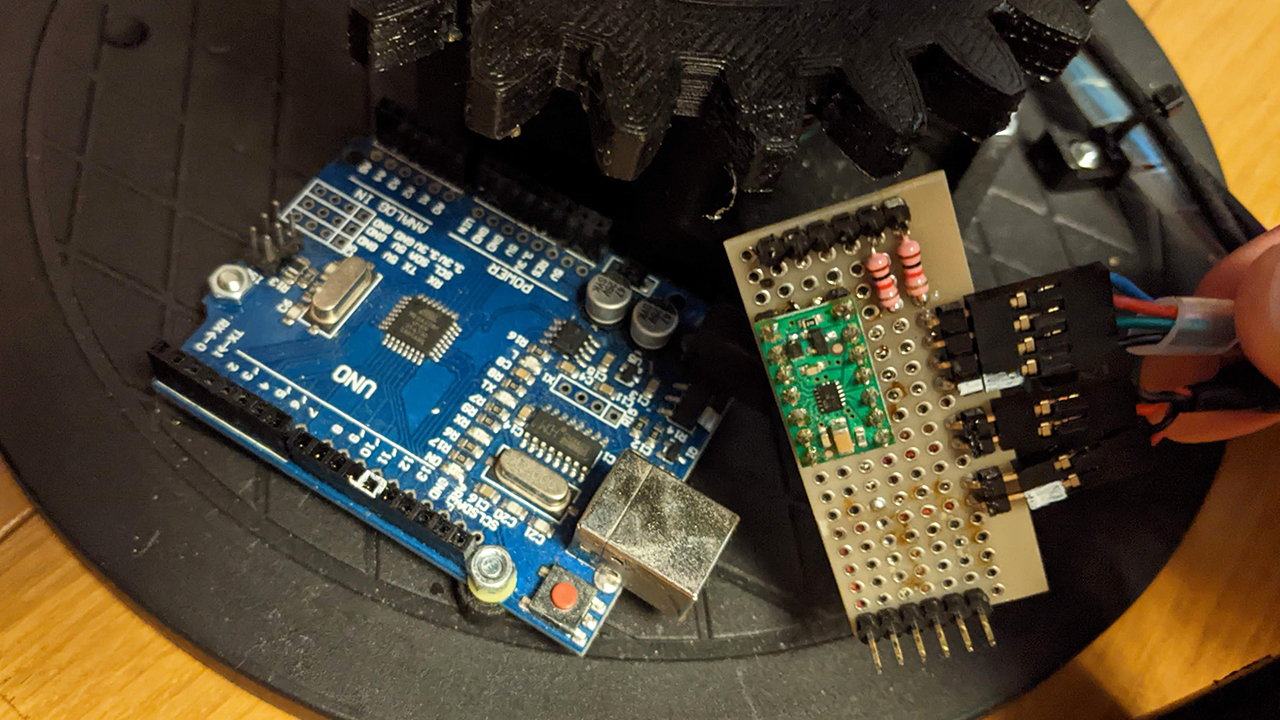
回路図・配線画像
{kind=link}
ステッピングモーターは、通電しているときにその場を保持する力が働きます。
そのため、ボタンが押されていないときは、モーターへ給電しない回路にしました。
これにより、ボタンが押されていない時はフリーとなり、手動でもロッドスタンドを回転させることができます。
プログラム
トルク力重視でステッピングモーターを制御するプログラムとなっています。
#define BIN2 8 // 青
#define BIN1 9 // 赤
#define AIN2 10 // 緑
#define AIN1 11 // 黒
// 停止間隔(大きいほど遅くてトルクが大きい)
int speed = 30;
// スイッチの入力Pin
int sw_pin = 12;
// SWの状態
volatile int sw;
void sw_on(void);
void setup() {
pinMode(BIN2, OUTPUT); // デジタルピンを出力に設定
pinMode(BIN1, OUTPUT);
pinMode(AIN2, OUTPUT);
pinMode(AIN1, OUTPUT);
pinMode(sw_pin,INPUT);
// 立ち上がりで割り込み処理開始
attachInterrupt(1,sw_on, RISING);
}
void loop() {
// スイッチを長押し中かどうか
sw = digitalRead(sw_pin);
// スイッチがONのときのみモーターを回転
// STEP1
digitalWrite(BIN2, HIGH);
digitalWrite(BIN1, LOW);
digitalWrite(AIN2, HIGH);
digitalWrite(AIN1, LOW);
delay(speed);
// STEP2
digitalWrite(BIN2, LOW);
digitalWrite(BIN1, HIGH);
digitalWrite(AIN2, HIGH);
digitalWrite(AIN1, LOW);
delay(speed);
// STEP3
digitalWrite(BIN2, LOW);
digitalWrite(BIN1, HIGH);
digitalWrite(AIN2, LOW);
digitalWrite(AIN1, HIGH);
delay(speed);
// STEP4
digitalWrite(BIN2, HIGH);
digitalWrite(BIN1, LOW);
digitalWrite(AIN2, LOW);
digitalWrite(AIN1, HIGH);
delay(speed);
}
// スイッチが押されたときの割り込み処理
void sw_on(void) {
sw = 1;
}
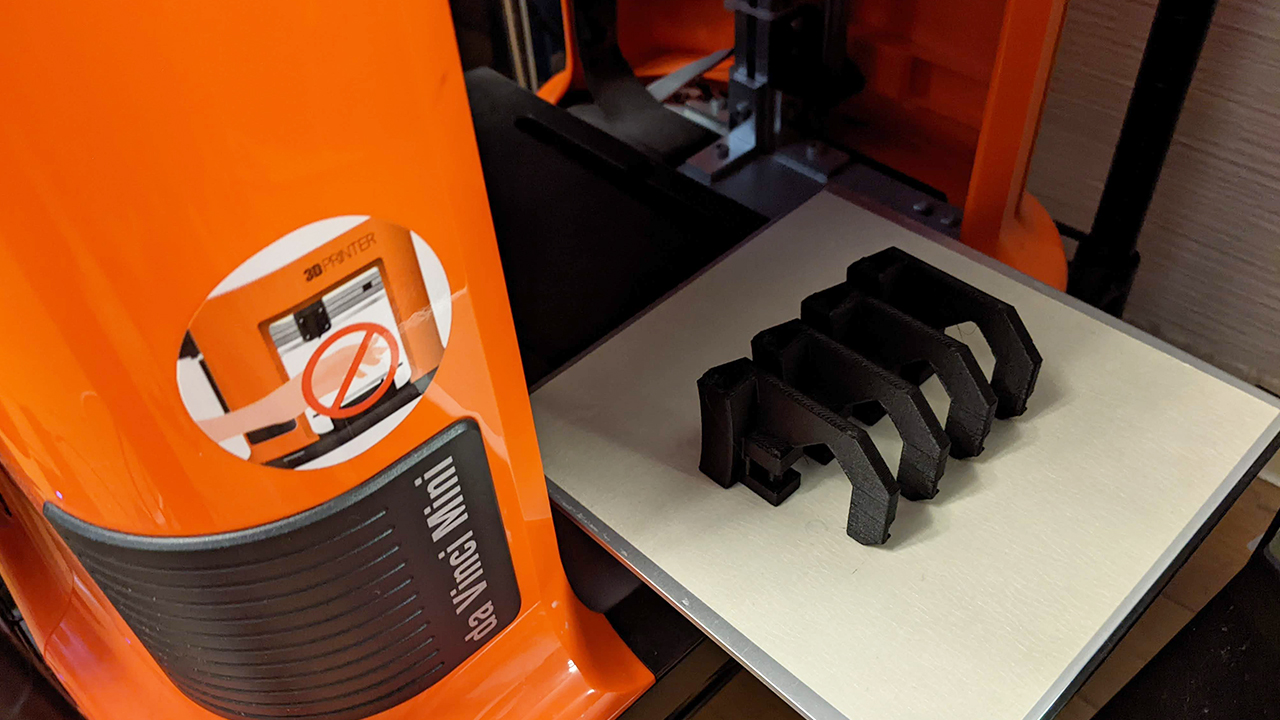
3Dプリンタ作成パーツ
{kind=link}
既製品では補えないパーツは、3Dプリンタを使って自作しています。
- 3Dプリンタ本体:ダヴィンチ mini(XYZプリンティング)
- フィラメント:タフPLAフィラメント
※3Dプリンタで作成した全てのパーツを紹介しているわけではありません。これら以外にも使用した細かいパーツがあります。
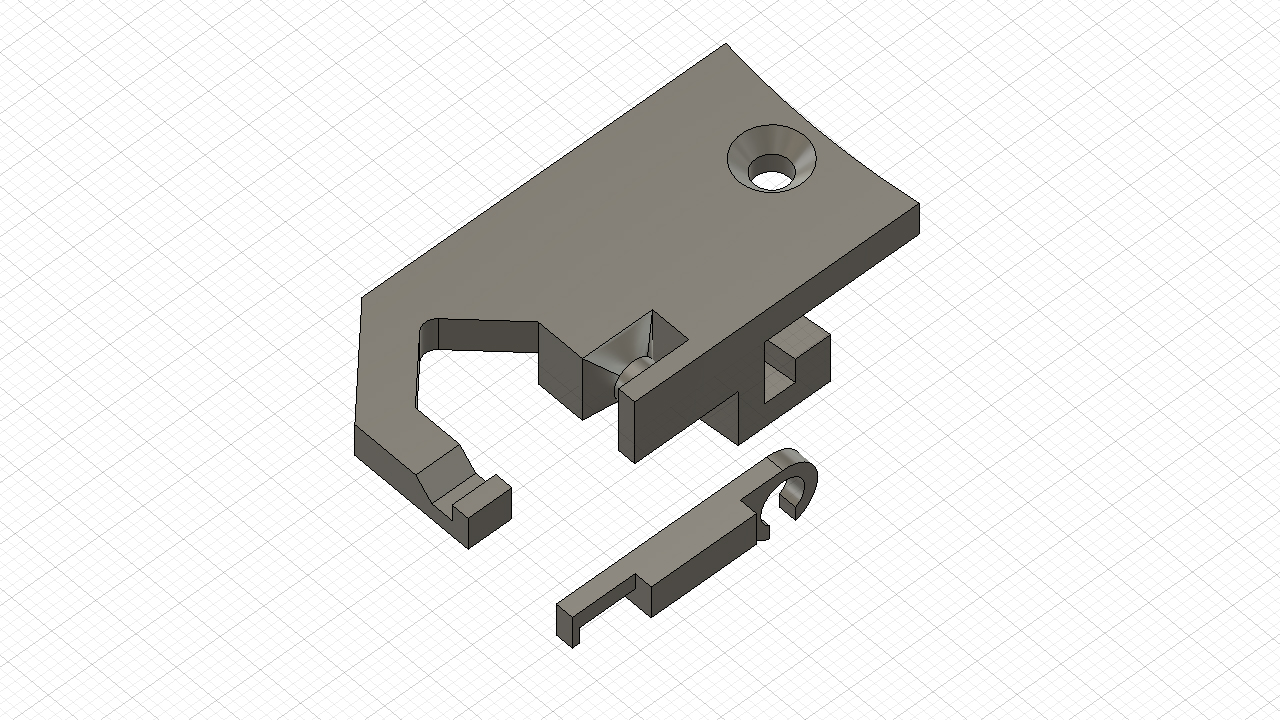
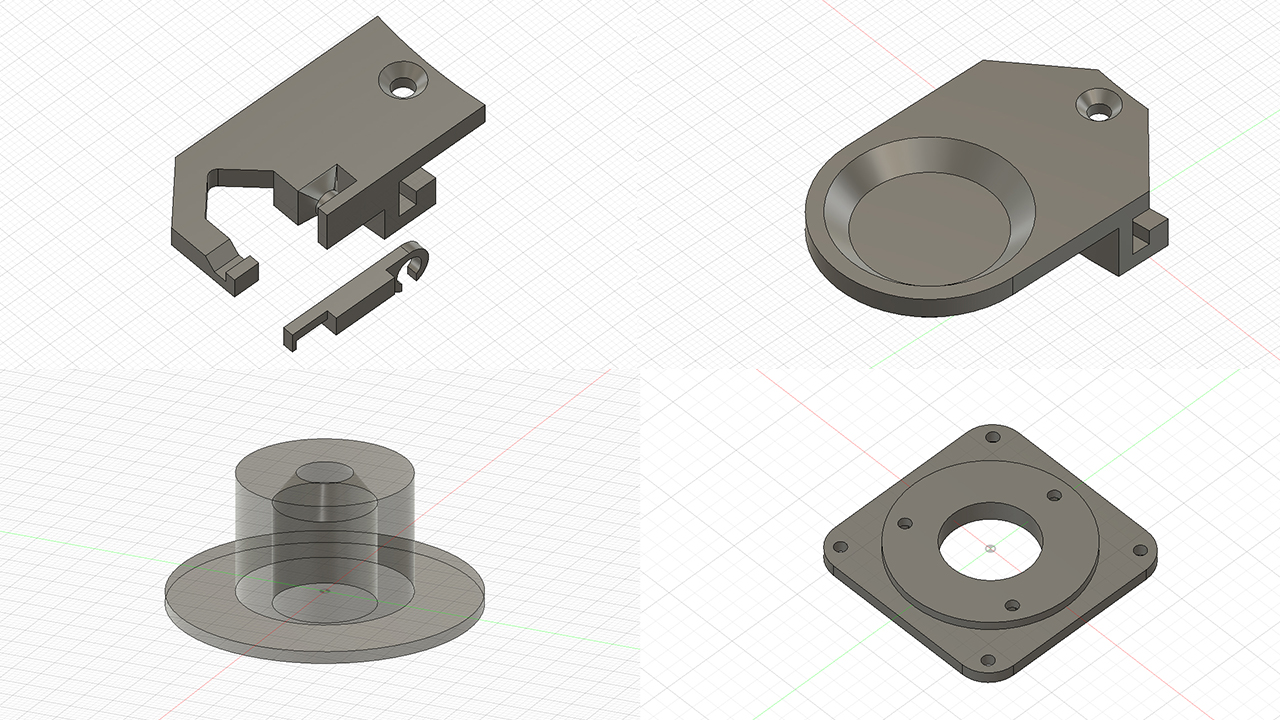
ロッドホルダー
{kind=link}
3Dデータのダウンロード ⇒ rod_holder.3mf
一般的なロッドスタンドは、立てかける時・取り出すときに便利な『C型』の形になっています。
ところが、回転するロッドスタンドの場合、回転運動により中でロッドが暴れます。
そのため、ホルダー部分に隙間があると、回転時にそこから飛び出してしまいます。
そこでロックを取付け、隙間なくホールドできる形状としました。
{kind=link}
ロックは上下に可動します。
本当は横可動のフックにしたかったのですが、遠心力によってフックが自動で開いてしまいます。
遠心力にも負けない力でホールドしようとすると、バネが必要になったり、強度面で不安が出てくるため、制作コストも跳ね上がってしまいました。
よって、重力だけでロックできるこのシンプルな構造を選びました。
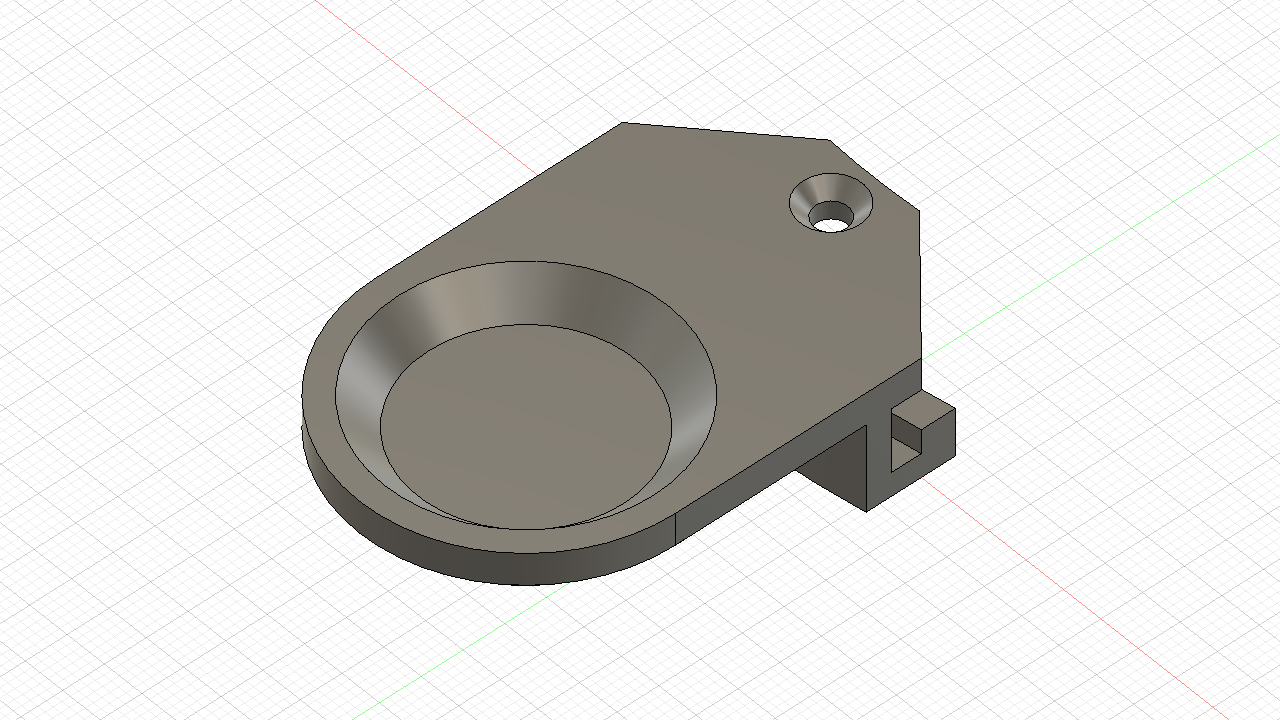
グリップホルダー
{kind=link}
3Dデータのダウンロード ⇒ grip_holder.3mf
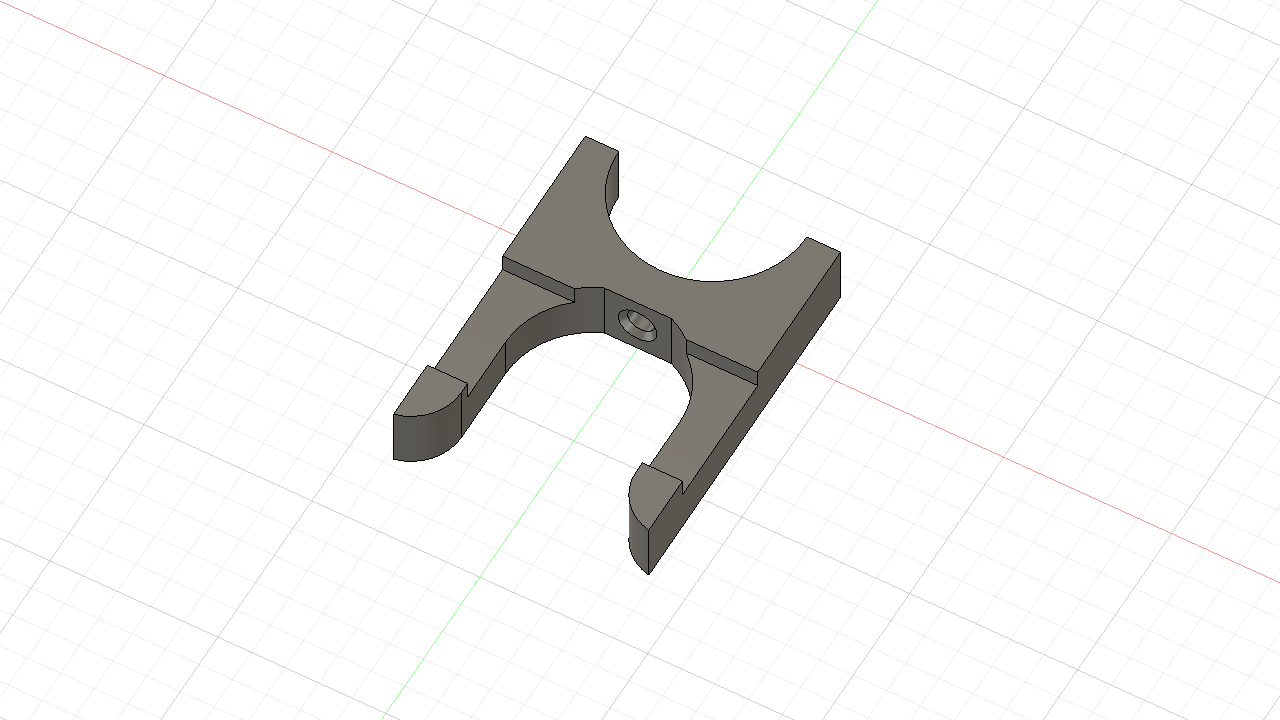
リールホルダー
{kind=link}
3Dデータのダウンロード ⇒ reel_holder.3mf
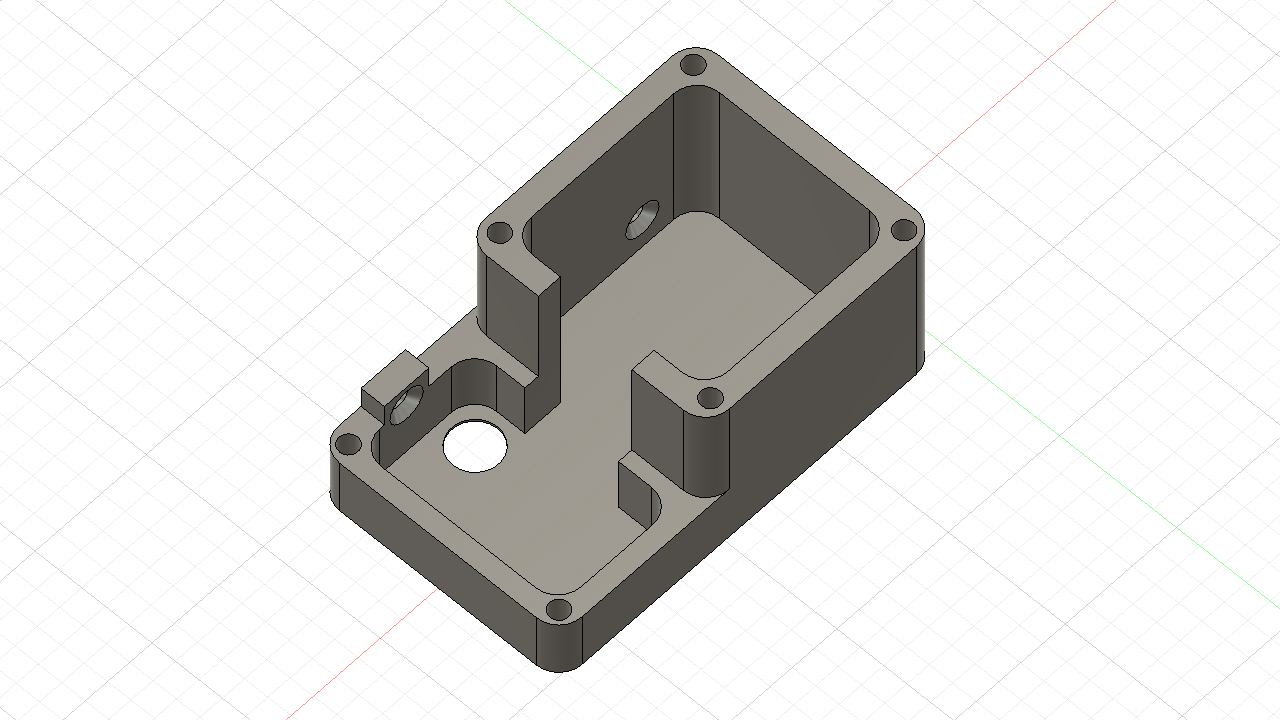
モーターマウント
{kind=link}
3Dデータのダウンロード ⇒ motor_mount.3mf
ギヤ
{kind=link}
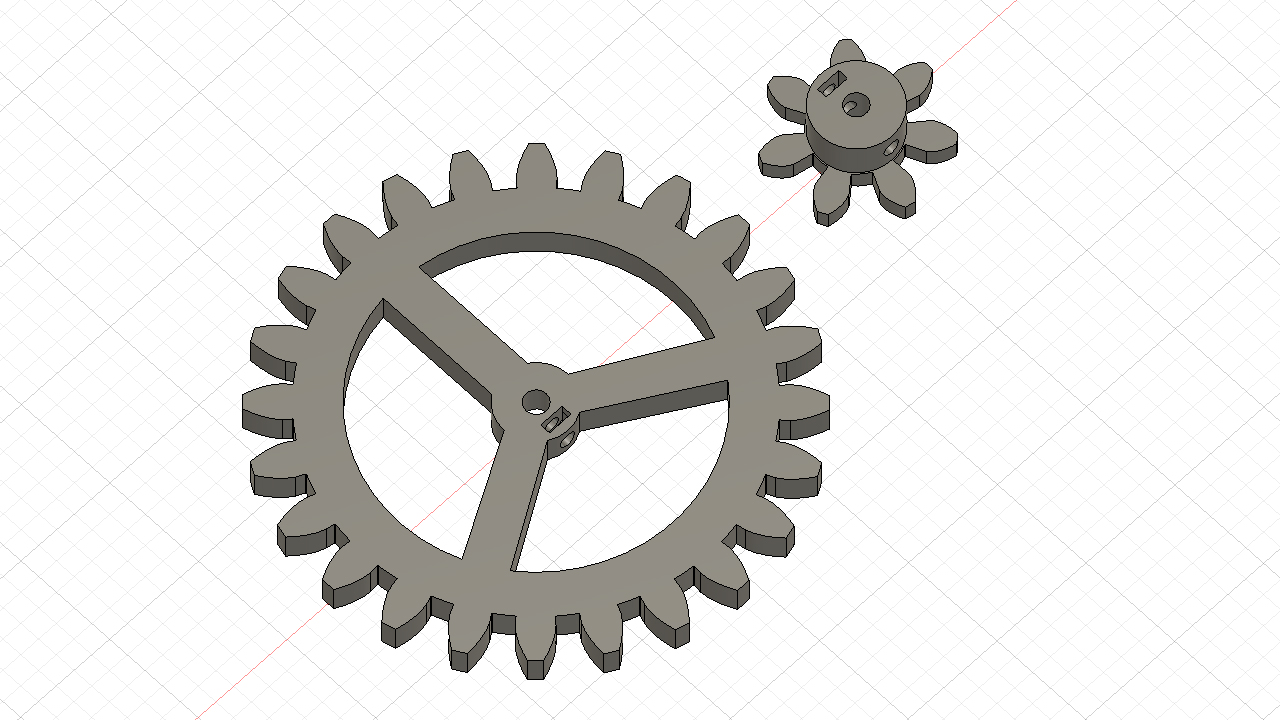
3Dデータのダウンロード ⇒ gear.3mf
『ギヤ』は芯ブレさせない構造のために、どうしても必要なパーツでした。
ギアを使わず、支柱ごと回転させれば、もっとシンプルな構造にできるんです。
しかしその場合、回転軸よりも遠いところに負荷が掛かりすぎてしまい、回転すると支柱がグラグラとブレてしまいました。
よって今回は、真ん中にドンと支柱を固定。
色々な荷重を支柱に預けることで、回転に必要な負荷を最小限に抑え、支柱の中に通した細いアルミ棒だけで天板を回転させる構造となっています。
もう一つの小さなギアは、グリップを支えている底板を回転させるためのもの。
支柱の中に隠れた回転動力を取り出すために使用しています。
手動タイプ
{kind=link}
手動タイプの回転ロッドスタンドも作ってみました。
手動式の回転ロッドスタンドに必要なもの
電動式よりも簡単で低コストにはなりますが、手動式の場合は『パイプスタンド』『ダンベルウエイト』『ベアリング』というパーツが必要になります。
- ダイソーの回転テーブル(直径:22cm)
- ベニヤ板(厚さ:4mm)
- イレクターパイプ:600mm(H-600)× 1本
- イレクタージョイントパーツ(J-103)× 2個
- イレクター パイプスタンド シングル(EF-1206S)
- ダンベルウエイト(VISION QUEST)1.25Kg - ヒマラヤ楽天市場店
- スラストベアリング(uxcell) 15×28×9mm - Amazon
手動タイプを自作したときの費用は、約5,000円です。
3Dプリンタ作成パーツ
{kind=link}
- ロッドホルダー(3Dデータのダウンロード ⇒ rod_holder.3mf)
- グリップホルダー(3Dデータのダウンロード ⇒ grip_holder.3mf)
- ベニヤ板とジョイントパーツ/J-103を繋ぐアタッチメント(3Dデータのダウンロード ⇒ board_att.3mf)
- パイプスタンドとダンベルを繋ぐアタッチメント(3Dデータのダウンロード ⇒ stand_att.3mf)
ダンベルの使い道
{kind=link}
『パイプスタンド』は土台、『ダンベルウエイト』はバランスをとるための重しです。
重しがないと、「竿を立てる位置の偏り」や「手で回転させるとき」に、バランスが崩れて倒れてしまいます。
{kind=link}
VISION QUESTのダンベルがパイプスタンドの底面にシンデレラフィットしました。
スラストベアリングの使い道
{kind=link}
トラストベアリングは、一般的な回転軸に用いられるベアリングとは違い、荷重を受ける方向に使用するベアリングです。
ベアリングを使用することで、接地面を減らし(摩擦を減らす)、スムーズに回転させることができます。
このトラストベアリングは、パイプスタンドの中に入れています。
このベアリングがないと、イレクターパイプとスタンドが中で干渉して、ガタガタしたり、異音がしてしまいます。